奇点汽车黄浴博士谈无人驾驶:Deep Learning在自动驾驶领域的应用
时间:2020-07-08 11:22 来源:网络整理 作者:北京it资讯 点击:次
近日,全球计算机视觉与人工智能领域顶级科学家,奇点汽车美国公司总裁黄浴博士在上海大学发布了名为《Deep Learning for AutonomousDriving》(深度学习在自动驾驶领域的应用)的精彩演讲。黄博士表示:“自动驾驶是一块具有挑战性的自动智能应用领域,许多研究对于实现汽车的自动驾驶是十分有必要的。 黄浴博士曾任百度美国研发中心自动驾驶资深软件架构师,还曾在Intel总部、三星电子美国研发中心、华为、汤姆逊等多家著名的跨国技术公司任职,在人工智能领域有着丰富的经验和独到的见解。黄浴博士曾说过:“汽车时代的未来是智能汽车”,本场讲座,黄浴博士针对自动驾驶的技术算法、市场前景和价值及未来规划进行了深入的探讨。
图1:黄浴博士图片 身处硅谷多年的黄浴博士,切身感受到近年自动驾驶作为变革的核心驱动力正在加速汽车产业智能化。他表示,随着人工智能以及深度学习技术的成熟,所衍生出的自动驾驶技术,不仅是当前全球汽车与智能化出行的发展方向,更是各大车企争相抢夺的战略制高点。自动驾驶作为汽车产业未来转型升级的重要方向,背后庞大的市场空间,使其备受资本热捧,成为汽车产业下新的“蓝海”。 中国汽车市场一直对新技术保持拥抱开放的态度。自2016年起,人工智能,物联网,高性能计算等一系列新信息技术的产出,都为自动驾驶的发展增砖添瓦。外界曾纷纷猜测,自动驾驶在中国市场的发展前景或许是黄浴博士加入奇点汽车主要原因之一,在这里,他将所学付诸实践,实现商业落地。 黄浴博士的本次演讲干货满满,从理论架构到应用落地,给学子及与会人员带来了一场科技大餐。他围绕自动驾驶的概念和分级、深度学习在自动驾驶实现中的应用展开。视觉部分包括障碍物检测与识别、交通标志和交通灯(红绿)的探测识别、车道线和标记的识别等,详细阐述了对于传感器的功能与职能,包括标定与融合,以及场景分割、目标跟踪、驾驶员行为模型、end-to-end学习、驾驶监控等。 自动驾驶主要分为感知,规划和控制三大模块,感知层面,以各种传感器,例如激光雷达,毫米波雷达以及超声波雷达,高精度地图以及V2V车联网技术,完成对车辆周围环境的感知识别和对车辆自身精准定位;规划层面,通过感知层收集到的信息,对下一步行动进行规划,选择合理的路径,行为以及运动;控制层面,将决策控制信息与车辆底层控制系统深度集成,通过线控技术完成执行机构的电控化,达到真正的自动驾驶。另外,还有一种难度较大的端到端(end-to-end)深度学习方案,可直接通过接受传感器,简化系统流程,降低计算需求,从而实现自动驾驶。
图1:自动驾驶研发路径和研究方向 黄浴博士对照PPT内容,详细的阐述了自动驾驶的框架。“大家可以看到,硬件部分主要是传感器,有的时候还可以加入一些V2V,车的定位通过通信和执行器实现的,执行器可以作为独立控制。软件部分,车身是自带软件部分的,就是我刚才提到的感知、规划和控制。‘感知’就是对周围环境的认知,包括静态和动态。分成两部分,一部分是定位,就是你要知道你的车在什么地方。这个定位技术也有很多,大部分是通过地图来定位的,也有一些通过路标等各种信息来实现定位。感知的另一部分是障碍物检测,即动态和静态物体的识别“
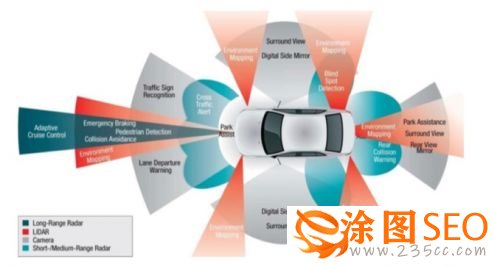
图2:自动驾驶 黄浴博士又提到,“当今主流自动驾驶路线主要有两个,第一类像特斯拉这样的成车厂商,一般都是从L2开始涉及自动驾驶领域,大多车企推出的大多是L2或介于L2与L3之间的自动驾驶汽车。第二类是像谷歌、百度等互联网企业在直接从L4入门,进入自动驾驶高档的分带,它实际上就是说我不需要考虑驾驶员的问题,我考虑的是怎么让机器来学习怎么驾驶。 聊到计算视觉及时下对这项技术的主流应用,黄博士说“计算视觉是一个从二维世界往三维世界的一个逆过程,实际上是一个病态问题。从70年代的计算视觉领域这个问题就暴露出来,大家始终在想办法去解决这个逆过程,它跟图形学正好是相反的,图形学是通过三维空间的模型来产生二维的图形,所以图形学只要计算量够,它是没问题的,它可以算出来。但是计算机视觉就是说它不仅仅是一个计算问题,它还是一个逆过程,有时候那个解是不稳定的。 我举个例子,大概2000年左右,微软用了PrimeSense公司(后来被苹果收购)的技术,推出了叫Kinect的产品。那个时候叫RGB-D传感器,实际上它是2.5维的,2.5维的传感器数据使计算机视觉的难度降低了好多。遗憾的是,普遍的2.5维传感器一般都照不远。Kinect基本上最多只能在五~六米范围工作,就是增强型的话也最多到十来米远。但是,对车,那是根本不行的,车不可能用这个东西检测周围环境。目前有用RGB-D传感器的车企,大概只是将它放在车前比较低的地方,用它照路面来监测一些比如车道线或者非常近的障碍物,显然这种东西只能在低速的情况下使用。 “所以谷歌,包括百度他们采用的是激光雷达,激光雷达都是通过发射激光然后接受回波来重建三维的空间。每个点的点上它有三维的坐标,甚至还有反射值。反射值可能会根据你的材料的不同有所不同,有的时候这个反射值也能发挥作用。所以谷歌的做法就是通过激光雷达来作为主要的障碍物检测。那么相机用来干什么?相机主要是用来做一些激光雷达做不了的事情。比如说可以做交通红绿灯检测,可以做交通标志的检测,然后还可以做一些警察的手势分析,比如说遇到前面的路已经堵了,或者要说要求拐弯了,就是说这块路已经封了,他就会在那儿帮你做一些指导,他们用相机来做。”关于激光雷达和相机黄浴博士给出上述解释。 据报道,奇点汽车初代量产车型奇点iS6上市时能实现L2级别的高级辅助驾驶能力,包括适用全速度的自适应巡航、车道保持、紧急制动、自动泊车、盲区检测等十余项功能。奇点汽车目标于2018年内将自主驾驶算法提升至L3(SAE标准),场景包括高速公路的自动驾驶,以及有限的城区道路自动驾驶等。 (责任编辑:北京IT资讯) |